

物理科学
近日,新加坡南洋理工学院李红教授和王一凡教授团队合作研究,提出了一种电化学气动电池(EPB),可以利用电化学氧化还原反应产生气压和真空(负压)。本文首先研究了 EPB 的电池性能,并展示了 EPB 的几种可能的应用,强调了其作为机器人应用中替代气源的潜力,并扩展了气动机器人设计和功能的范围。 2024年9月20日,相关研究成果以“for”为题发表在Cell Press期刊上。
研究亮点
首次使用基于锌氧电化学原理的电池为机器人系统生产可重复使用的气源,该电池重量轻、灵活且安静。
创新性地结合电池材料的平整性和易切割特性,成功实现了紧凑的“材料-机电一体化”机器人执行器,包括正压、负压驱动器和变刚度组件。
本研究提出的电化学气动电池(EPB)将积极推动气动软机器人、可穿戴设备和自主移动机器人系统的发展。
研究简介
气动机器人使用加压气体产生运动并执行系统控制。气源通常是气泵或储气装置。尽管气动机器人已被广泛研究,其柔顺的驱动特性受到软体机器人和可穿戴设备研究的青睐,但大多数机器人受到气源体积、重量、噪音和能耗的限制,难以实现轻量化。 、合规性和自主能量收集。这些基本问题在开发气动软机器人、可穿戴设备、自主无人系统等时变得尤为明显,突破它们变得极具挑战性。
近日,新加坡南洋理工学院李红教授和王一凡教授团队合作研究,提出了一种电化学气动电池(EPB),可以利用电化学氧化还原反应产生气压和真空(负压)。它采用无毒材料和可控电化学过程,确保电池在使用过程中的安全,同时无电机设计确保安静使用。 EPB在放电时可以同时为机器人提供电力和部分真空动力,在充电时可以提供正气压动力。由于电池本身采用平面正负极材料,这种电池可以很好地设计成各种软体机器人执行器,提供所需的刚性或灵活性,以实现紧凑的材料-电子控制系统集成,而且这种电池材料适合大规模自动化生产,具有商业可行性。本文首先研究了 EPB 的电池性能,并演示了 EPB 的几种可能的应用,强调了其作为机器人应用中替代气源的潜力,并扩展了气动机器人设计和功能的范围(如图 1 所示)。

图1:基于EPB的机器人应用展示。
气动驱动作为自动化和机器人的主流驱动方式之一,具有灵活性好、清洁、配置相对简单的特点。它不仅广泛应用于工业机器人系统,而且在软体机器人和可穿戴设备方面也有大量的研究,形成了大量的气动执行器。但气驱的缺点也很明显。作为系统工作的基石,气源往往由电动气泵提供。这些气泵通常体积庞大且噪音大,并且无法与软机器人和自主移动机器人很好地集成。气源问题已成为制约气驱机器人在这些新领域进一步发展的重要瓶颈。纵观现有关于气源问题的研究,一些工作一直在尝试用新的方法为机器人提供气源,如由人造肌肉、相变材料组成的气泵、爆炸等化学反应的气源等。但它们普遍缺乏可控性和安全性,需要较高的电压或剧烈不稳定的化学反应才能产生足够的气压或足够的气体。在这项工作中,我们设计了一种基于锌氧化还原反应的锌空气电池,它利用可逆金属空气电池机制提供电力和气动动力,包括正压和负压。这种电化学气动电池安静、紧凑,无需连接外部设备,如图 2 所示。
图 2:EPB 的基本概念和组件。
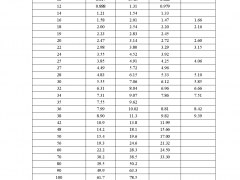
我们设计了实验来验证和表征EPB在电化学和气体生成方面的性能,如图3所示。EPB在充电时可以释放氧气,在充电时可以吸收氧气。在常压、恒定电流下,氧气的体积与时间成正比。我们的 EPB 法拉第效率约为 95%,压力范围为 -0.98(真空)至 3.9 个大气压。我们还测试了EPB的循环充放电性能。在5 mA/cm2的恒定电流下,EPB可以充放电135次而不影响其性能。为了进一步提高EPB的电化学性能,我们采用纳米压印技术制备了表面覆盖纳米线的锌电极。该电极进一步提高了EPB的电化学性能和储气能力。
图3:EPB的电化学性能测试。
基于EPB优异的电化学性能和稳定、安全、可控的气体控制能力,我们设计并实现了两种不同的气源。延续机器人行业中气源的传统使用方式,我们将EPB制作成电池组,并基于工业中常见的阻挡效应成功驱动气动夹具和可变刚度腕带(图4)。另一种则考虑到EPB电极材料平面且易于加工的特点,将电池本身作为机器人执行器的结构材料进行集成,以实现致密层阻挡变刚度组件、气囊执行器和折纸执行器(图4)。
图 4:基于 EPB 的机器人气源和新型执行器。

作者访谈
细胞出版社官方账号特邀李红教授独家专访,为您做进一步详细解读。
:
请简要概述本次工作的亮点。
李红教授:
气动机器人是指利用加压气体产生运动和系统控制的机器人。它们的气源通常是气泵或储气装置,例如电动泵和钢瓶压缩气体。虽然气动机器人的研究很多,比如常见的软爪、康复设备等,但这些机器人大多都离不开气源。这些电机泵和气缸的尺寸、重量、噪音和能耗对于传统机器人行业来说可能不是问题,但对于软机器人来说却是个大麻烦。想要做到轻量化、柔软并与软件相匹配是很困难的。更不用说可以自主移动的无线软机器人了。为此,我们涉足软体机器人中很少结合的领域——电化学,并提出了一种基于电化学原理的气动电池(EPB)。它能够利用电化学氧化还原反应产生气压和真空(负压)。其特点是结构非常紧凑,只需要动力产生氧气来改变气压。而且,它还可以在消耗氧气的同时放电,为机器人提供动力。因此,我们可以彻底摆脱使用电动泵或气缸作为气源的情况。此外,该材料还可以直接用于设计机器人执行器结构,如我们的论文所示。
:
研究过程中遇到了哪些困难?团队是如何克服并成功解决的?

李红教授:
我们认为这项研究的最大困难是如何将电化学知识与软机器人研究问题结合起来。在传统电化学领域,电池中产生气体和泄漏并不是一件好事。往往会揭示电池性能较差,容易产生鼓包等现象,对电池有害,需要避免。然而,在软体机器人中,尤其是气动机器人的设计中,气体的控制是必要的,也是最基本的东西。我们很幸运能够在这两个领域之间找到合作,并进行创新,将电池的产气特性与软机器人技术相结合。
:
团队下一步的研究计划是什么?
李红教授:
接下来我们将系统地进行电池设计和驱动器设计方面的研究。尝试新的电化学方法并对设计的执行器进行更详细的机械研究,以最大限度地提高气动电池的性能。我们也希望有兴趣的学者也能加入到气动电池的研发中来。
:
最后请与我们分享一下您选择的理由。

李红教授:
它是Cell Press的旗舰期刊,也是Cell、Chem、Joule和的姐妹期刊。我们工作的初衷是打造一套全新的气驱机器人气源解决方案和机器人执行器“材料、机电”一体化技术。这与我们的目标非常一致,即推动科研领域的创新融合和交叉融合,开发跨职能的独特应用技术成果,助力科研领域的发展。为了最大限度地发挥我们工作的影响,我们选择提交意见书。
作者简介
葛俊宇
博士
他在湖南大学获得学士学位,在新加坡南洋理工大学获得博士学位。目前在新加坡南洋理工大学航空航天工程学院从事博士后研究。
赵玉辰
副研究员
他在山东大学获得本科学位,在美国杜克大学获得博士学位。毕业后,在南洋理工大学机械与航空航天工程学院从事博士后研究。现为东南大学自动化学院副研究员。主要研究方向有:软体机器人、变刚度材料与结构、虚拟现实技术、力反馈设备等。
王一凡
南洋大学助理教授
新加坡南洋理工大学机械与航空航天工程学院南洋助理教授。他的研究兴趣集中在新型机器人材料的设计和制造上,这些材料通过结合粒子、胶体和纳米粒子等软物质构建块,具有前所未有的感知、响应和与周围环境通信的能力。这些研究的应用包括用于外骨骼和触觉传感的智能织物、微型变形机器人和活性声子超材料。王博士于2011年在中国北京大学获得物理学学士学位,2016年在美国芝加哥大学获得物理学博士学位。2017年至2020年在机械与工程系担任博士后研究员加州理工学院土木工程专业。 2020年12月加入南洋理工大学机械与航空航天工程学院,担任南阳助理教授。在《Nano》、《Nano》、《ACS Nano》、《Small》等顶级研究期刊上发表多篇论文。他还获得了格兰杰基金会实验物理学奖学金和南洋助理教授奖等多项奖项。他的作品也被全球媒体广泛报道。
李红
教授
他在新加坡南洋理工大学获得学士和博士学位。毕业后,他获得了新加坡千禧基金会(SMF)博士后奖学金。 2013年加入斯坦福大学机械工程系担任博士后研究员,专注于绿色制氢电催化研究(隶属于可持续能源催化中心)。他还与三星合作开发用于可穿戴设备的健康监测生物传感器。 2016年6月,李红博士加入南洋理工大学机械与航空航天工程学院/电气与电子工程学院担任南洋助理教授,并于2022年3月晋升为终身副教授。
相关论文信息