


热镀超厚规格及高强钢稳定性优化
李金良
(河北 承德)
摘要:高强钢材的钢板有诸多优势。与普通钢材相比,用高强的钢板制作钢结构,能有效降低钢材用量,进而减少施工量以及相关涂料与配件的使用量。从交通方面来看,还能降低运输压力,可实现有效的成本控制。从应用方面来讲,高强钢板的整体稳定系数比普通钢材更强。高强钢需求比较高。然而,生产超厚高强钢需要机电设备具备较大的能力,并且工艺技术要先进,所以生产的产量相对较少。同时,厚带钢生产在行业中一直存在一些共性问题,其中最普遍的情况是:需要机电承载能力大,生产过程中会出现跑偏、划伤等现象;张力不够会导致边部刮撕;卷取过程中会出现塔型;卸卷过程中会出现卡钢。
关键词:高强钢材;机电;张力;卷取
0引言
冷轧镀锌产线生产厚规格及高强钢主要有以下几个问题?
入口 1#无法自动穿带,穿带时会有刮钢情况。入口 2#也无法自动穿带,穿带过程中同样存在刮钢现象。并且在穿带过程中,还存在跑偏现象,这使得带钢刮撕。
穿带到 4#汇聚夹送辊,当带钢穿过 4#夹送辊时,可能会出现未穿过去而后起套的情况,也可能会出现带头穿过后插入导板下方的问题。
焊机出口夹送辊是由液压马达驱动的。因为厚度不同,所以液压马达的实际速度也不同。这就导致了焊机出口定位不准确,出口侧要么没有套量,要么套量太少,从而无法实现自动焊接。
焊机出口处,5#夹送辊与 1#张力辊之间没有拖辊。因为厚带钢过重钢材热镀锌厚度要求,所以带钢会搭到 1#张力辊上。在动作时,就会造成带钢之间的剐蹭。
入出口活套的套量比较小。在正常情况下,焊机只有 1#重焊机能够使用。一旦出现故障,就会导致工艺段降速,甚至会使工艺段停车。
出口剪切完成后,会出现带钢在 8#张力辊打滑的情况,还会有带钢向后倒退的问题。在穿带过程中,存在起套及跟踪定位不准的问题。在卷取过程中,会有跑偏等现象。
卸卷时,带钢卡钳口会出现问题,在芯轴收缩的过程中,小车会下降,导致无法卸卷。
1入口跑偏、划伤及起套问题优化
优化 4#夹送辊程序,在带头从等待位穿带到焊机的过程中,提前把汇聚夹送辊关闭至中间位置。当带头穿过汇聚夹送辊后,将汇聚夹送辊完全关闭。与此同时,在现场进行放线操作,并增加夹送辊中间位置检测的接近开关。
程序对开卷机压辊动作时序进行优化。若检测到开卷机上卷为厚带钢,那么压辊会提前压下,这样能确保带头可以顺利进入夹送辊。同时,会配合机械来校准夹送辊及矫直机的水平度,以保证带钢不跑偏。矫直机增加了带钢大于 5mm 后全程压下的功能,并且在跑线后不会打开,以此来确保带钢不剐蹭。
优化 1#张力辊组的速度与 5#夹送辊的速度,让 1#张力辊速度超前 5#夹送辊速度,以此来保证带钢处于拉直状态,避免带钢与 1#张力辊表面带钢剐蹭,并且同时对 5#夹送辊的动作时序进行优化。
2优化焊机出口套量
优化焊机出口套量,按照不同厚度去对应 PDA 记录的焊机出口夹送辊速度,接着对主线速度进行优化。镀锌线的厚度范围是 0.5 到 6.0 规格,在这个规格范围内又分成 7 组厚度。依据不同的厚度范围来分配不同的主线速度。这样就保证了出口套量的稳定,避免了出现套量过大后无套的状况。
2.1 焊机侧定位逻辑不变。

根据以往规格,不同厚度对应着 PDA 记录的焊机出口夹送辊速度。对于主线速度进行优化时,镀锌线的厚度范围是 0.5 - 6.0 规格。在这个规格范围内又分为 7 组厚度。要根据不同的厚度范围来分配不同的主线速度。
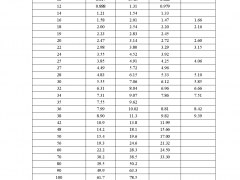
2.3 不同厚度对应速度分配表
1.0mm以下----------60m/min
1.0mm-2.0mm-----------59m/min
2.0mm-3.0mm-----------58m/min
3.0mm-4.0mm-----------56m/min
4.0mm-4.8mm-----------55m/min
4.8mm-5.4mm-----------52m/min
5.4mm以上-----------50m/min
3 活套套量优化
将入出口活套的急停位和快停位后移,在确保能安全停车的情况下,把活套的工作区间提高,让带钢能更多地运行使用,以此来保证焊机以及入出口的稳定。
3.1 入口活套
3.1.1 入口活套原始值
活套激光测距的空套位程序有保护,快停位的软极限位是-0.0113“地址.”
活套激光测距的满套位程序有保护快停位,其软极限位是 1.0113“地址.”
活套车工作的区间,其 100%所对应的量程是 47.932m“地址”。
活套偏置值是 12.82m,当空套的零位出现变化(也就是处于 0%的位置时),就需要对这个偏置值“地址”进行修改。
活套套量100%对应激光测距实际值为8.052m
活套套量0%对应激光测距实际值为55.984m
活套车的工作区间从 0%到 100%的距离为 55.984 减去 8.052,结果是 47.932 米。
3.1.2 位置修改完成后快停位激光测距的实测值
入口空套快停激光测距值为58.8m
空套零位为快停前0.6m即58.2m

入口满套快停激光测距值为4.17m
满套零位为快停前0.6m即4.77m
入口活套车的 0%-100%区域的距离是 58.2 米与 4.77 米的差,即 53.43 米。
入口侧的偏置值是 58.2 减去 47.932 再减去 8.052,结果为 2.216m
3.1.3 调试修改步骤
第一步标定满套位激光测距值。将 FB261 的中 0%套量激光测距值 8052 改为 4770;将活套车工作区间值 47932 改为 51214;将块中 100%区间对应的量程 47.932 改为 51.214。修改完成后观察全线跟踪。
第二部标定空套位激光测距值,其中活套车工作区间值 51214 被改为 53430;块中 100%区间对应的量程“地址.”从 51.214 改为 53.43,偏置值“地址.”从 12.28 改为 10.064。
第三步,若修改完成后跟踪出现偏差,那么可以对固定部分长度“地址.”进行微调。要根据现场焊缝的实际位置来判断是增加还是减少。如果焊缝检测窗口提前打开,就需要减少此固定部分长度;如果焊缝检测窗口靠后,就需要增加此固定部分长度。
第四步画面已经增加了值。如果焊缝跟踪位置不正确,那么可以依据焊缝的实际位置来同步跟踪画面。在总画面的右侧,选择要同步的焊缝号以及要同步位置的值,就能够实现同步。

图一FB261

图二
3.2 出口活套
3.2.1 出口活套原始值
活套激光测距的空套位程序有保护作用,快停位的软极限位是-0.006“地址”。
活套激光测距的满套位程序有保护快停位,其软极限位是 1.006“地址”。
活套车工作区间100%对应的量程为39m“地址 .”
活套偏置值是 17m,当空套的零位出现变化,也就是处于 0%的位置时,就需要对这个偏置值“地址”进行修改。
活套套量100%对应激光测距实际值为7.6m
活套套量0%对应激光测距实际值为46.6m
活套车工作区间0%—100%距离为46.6-7.6=39m
3.2.2 位置修改完成后快停位激光测距的实测值

出口空套快停激光测距值为49.32m
空套零位为快停前0.6m即48.72
出口满套快停激光测距值为4.13m
满套零位为快停前0.6m即4.73m
出口活套车的 0%到 100%区域的距离是 48.72 米与 4.73 米相减的结果,即 43.99 米
入口侧偏置值为48.72-39-7.6=2.12m
3.2.3 调试修改步骤
修改完成后观察全线跟踪。
第二步进行空套位激光测距值的标定。其中,FB261 的中活套车工作区间值 41.87 被改为 43.99;块中 100%区间对应的量程“地址.”41.87 被改为 43.99,偏置值“地址.”17 被改为 14.88。
第三步若修改完成后跟踪有偏差是可以微调固定部分长度“地址.”,根据现场焊缝实际位置判断增加及减少,如果焊缝检测窗口提前打开,则需要减少此固定部分长度,如果焊缝检测窗口靠后,则需要增加此固定部分长度。
第四步画面已增加值,如果焊缝跟踪位置不正确,可根据焊缝实际位置同步跟踪画面,在总画面中右侧选择要同步的焊缝号及要同步位置的值即可同步。

图一FB261

图二
4 张力优化
优化全线张力上限值,保证超厚高强钢张力满足产线要求。
4.1 张力前后优化表
序号
名称
优化前最大张力
优化前最大张力
开卷机
50KN
30KN-40KN
冷却塔
90KN
110KN
平整机入口
140KN
170KN
平整机出口
140KN
170KN
后处理塔
100KN
120KN
卷取机
120KN
150KN

优化入口开卷机的张力控制逻辑,依据卷径的大小来自动匹配张力限幅。张力的设定值是 40KN,并且会根据卷径大小自动进行线性限制设定值。其中,0 到 10KN 对应的卷径范围是 1.5 到 2m。当卷径小于 1.5m 时,设定值为最大的 40KN;当卷径为 2m 时,设定值为 30KN。
5 活套张力设定优化
出口分切时把活套张力设定减小,将其设定为原来设定值的 85%。在 8#张力辊前增添托辊,以此增加包角,进而增大摩擦力。并且取消前 20 米的涂油。对主从关系进行优化。
5.1 传动的改动:
负荷平衡的主从控制的位在传动执行脚本时已连接好,能够实现任意一个辊做主辊。同时需将 8 号张力辊的 1 号辊的积分部分发送给 2 号,将 2 号辊的积分部分发送给 1 号。也就是 1 号辊的参数 p1478[0]与 2 号辊的 p1482 相链接,2 号辊的 p1478[0]与 1 号辊的 p1482 相链接。
同时为了能够连接参数负荷分配的系数,将自动化 PZD10 连接到分配系数上,也就是把参数 p1479[0]连接到 p2050[9],并且两个辊需要进行同样的修改。
5.2 自动化的修改:
把负荷平衡的主辊从 1 号辊改为 2 号辊,同时启用 1 号的控制位,禁止启用 2 号控制位。
将.和.设定为负荷分配系数,目前 2 号辊是主辊,2 号辊使用默认系数 1.0,1 号辊依据带钢厚度选取不同的分配系数,也就是 1 号辊会使用不同的系数 0.9、0.8 和 0.7 等,这些系数可根据实际情况进行调整。
5.2.3 将传递给PZD10, 即.和.。
修改活套的张力时,在分切的情况下,不仅要将设定张力降低到 90%,还增加了最大张力限幅为 85KN(穿带完成后会恢复成 110KN),这样做是为了减少活套对 8 号张力辊压辊的拉力。
6 优化卸卷过程中带钢卡钳口
优化卸卷过程中的带钢卡钳口,当芯轴收缩且小车下降时会出现无法卸卷的问题,为此增加了小车 2 次提升功能,以确保钢卷与芯轴之间无摩擦,同时还增加了钳口抚平功能,从而保证钳口不会卡带钢。
并且要注意,2 次提升的高度不能超过触卷提升位置值加上 5MM。
增加钳口抚平功能。小车自动步中增加了芯轴转动功能,芯轴会轻微转动,这样就能把带钢头转出钳口一块,从而减少卡钢的情况。
6.3 根据不同重量对应提升时间分配表

8t 到 13t 这段时间,时长为 100ms 。
3t 减去 18t 等于 150ms 。 3t 与 18t 相减的结果是 150ms 。 18t 从 3t 中被减去后得到 150ms 。 3t 减去 18t 这一运算的结果为 150ms 。 3t 减去 18t 所得的数值是 150ms 。
18t 到 23t 这段时间钢材热镀锌厚度要求,时长为 200ms。
23t以上------------------250ms
优化甩尾长度,对于 5.5mm 以上的厚带钢增加甩尾长度,以确保尾部不会被弹开。并且画面具备了长度微调的功能。
7结语
通过上述优化措施,取得了显著效果。首先完成了对 4#汇聚夹送辊动作时序的优化,在穿带过程中,出现了起套或带头有时会插入导板下方的问题。第二完成了以下工作:焊机出口定位不准确,出口无套量或套量太少,致使无法自动焊接,之后实现了自动焊接;第三解决了入口穿带过程中出现的划伤和跑偏问题,从而实现了自动上卷、开卷;第四完成了入出口活套长度的优化,使产线运行时间得以增加。保证重焊时间为 2 次;第五完成了全线的张力优化工作;第五解决了出口剪切完成后,带钢在 8#张力辊处出现打滑且带钢向后倒退的问题;第六对卸卷过程中带钢卡钳口以及芯轴收缩过程中小车下降导致无法卸卷的问题进行了优化,实现了镀锌厚带钢的自动上卸卷功能;第七解决了穿带卷取过程中的跑偏问题,并优化了出口甩尾的长度。最终实现了批量生产时,厚规格产品合格率达到95%以上。
参 考 文 献
[1] 钢材热镀锌[M]. 北京化学工业出版社,2006
[2] 冶金自动化[J]. 冶金自动化杂志社,2009
宝钢冷轧厂新建了热镀锌机组,对其张力控制系统进行了研究。该研究成果以学位论文的形式呈现,学位授予单位为武汉科技大学,时间是 2008 年。

欢迎您加入炼铁、炼钢、轧钢厂长交流群
进群加,邀您入群